关于容器技术的小抄
文章目录
Docker
最初风靡一时的 Paas 项目提供的“应用托管”,其最核心的组件就是一套应用的打包和分发机制。为了对多用户的应用环境进行隔离,会调用操作系统的 Cgroups 和 Namespace 机制为每一个应用单独创建一个称作“沙盒”的隔离环境,然后在“沙盒”中启动这些应用进程。这就是所谓的“容器”。
Docker 实际上只是一个同样使用 Cgroups 和 Namespace 实现的“沙盒”而已,但 Docker 迅速崛起的原因在于 Docker 镜像。在 Docker 之前,在 Paas 上部署应用最棘手的问题在于应用程序的“打包”。这个打包过程,没有任何章法可循,更麻烦的是,明明在本地运行得好好的应用,却需要做很多修改和配置工作才能在 PaaS 里运行起来。
Docker 镜像解决的,恰恰就是打包这个根本性的问题。所谓 Docker 镜像,其实就是一个压缩包。但是这个压缩包里的内容,比 PaaS 的应用可执行文件 + 启停脚本的组合就要丰富多了。实际上,大多数 Docker 镜像是直接由一个完整操作系统的所有文件和目录构成的,所以这个压缩包里的内容跟你本地开发和测试环境用的操作系统是完全一样的。
Docker 项目能够迅速风靡起来,主要得益于它提供了一种非常便利的打包机制。这种机制直接打包了应用运行所需要的整个操作系统,从而保证了本地环境和云端环境的高度一致,避免了用户通过“试错”来匹配两种不同运行环境之间差异的痛苦过程。
隔离与限制
Linux 的 namespace 机制提供了一种资源隔离方案,使得 PID, Mount, Network 等系统资源不再是全局性的,而是属于某个特定的 Namespace。每个 namespace 下的资源对于其他namespace 下的资源都是透明,不可见的。namespace 是 Linux 创建新进程时候的一个可选参数。
所以, Linux 容器的最基本原理实际上就是在创建容器进程时,指定了这个进程所需要启用的一组 Namespace 参数。这样,容器就只能“看”到当前 Namespace 所限定的资源、文件、设备、状态,或者配置。而对于宿主机以及其他不相关的程序,它就完全看不到了。所以说,容器,其实只是一种特殊的进程。在使用 Docker 的时候,并没有一个真正的“Docker 容器”运行在宿主机里面。Docker 项目帮助用户启动的,还是原来的应用进程。所以,“敏捷”和“高性能”是容器相较于虚拟机最大的优势,但是容器的安全性,也就是隔离性,还是没办法达到虚拟机的级别的。
既然容器进程只是宿主机上的一个应用进程,那么就必然要和宿主机上的其他进竞争资源。而Linux Cgroups 就是 Linux 内核中用来为进程设置资源限制的一个重要功能。Linux Cgroups 的全称是 Linux Control Group。它最主要的作用,就是限制一个进程组能够使用的资源上限,包括 CPU、内存、磁盘、网络带宽等等。
一个正在运行的 Docker 容器,其实就是一个启用了多个 Linux Namespace 的应用进程,而这个进程能够使用的资源量,则受 Cgroups 配置的限制。这也是容器技术中一个非常重要的概念,即:容器是应该是一个“单进程”模型。容器本身的设计,就是希望容器和应用能够同生命周期。用户的应用进程应该是容器里 PID=1 的进程。
镜像
为了能够让容器的这个根目录看起来更“真实”,我们一般会在这个容器的根目录下挂载一个完整操作系统的文件系统,比如 Ubuntu16.04 的 镜像。这样,在容器启动之后,我们在容器里通过执行 “ls /” 查看根目录下的内容,就是 Ubuntu 16.04 的所有目录和文件。
而这个挂载在容器根目录上、用来为容器进程提供隔离后执行环境的文件系统,就是所谓的“容器镜像”。它还有一个更为专业的名字,叫作:rootfs(根文件系统)。需要明确的是,rootfs 只是一个操作系统所包含的文件、配置和目录,并不包括操作系统内核。在 Linux 操作系统中,这两部分是分开存放的,操作系统只有在开机启动时才会加载指定版本的内核镜像。所以说,所谓容器打包了操作系统,其实是指打包了操作系统相关的一些文件,而且还会裁剪掉不必要的东西,所以镜像本身其实是不大的。
对一个应用来说,这种深入到操作系统级别的运行环境一致性,打通了应用在本地开发和远端执行环境之间难以逾越的鸿沟。由于 rootfs 里打包的不只是应用,而是整个操作系统的文件和目录,也就意味着,应用以及它运行所需要的所有依赖,都被封装在了一起。正是由于 rootfs 的存在,容器才有了一个被反复宣传至今的重要特性:一致性。
在 rootfs 的基础上,Docker 在镜像的设计中创新性地提出了使用多个增量 rootfs 联合挂载一个完整 rootfs 的方案,进而引入了层(layer)的概念。也就是说,用户制作镜像的每一步操作,都会生成一个层,也就是一个增量 rootfs。这里用到了联合文件系统(Union File System), UnionFS 的最主要的功能是将多个不同位置的目录联合挂载(union mount)到同一个目录下。
一个容器的 rootfs 主要由三部分组成,即只读层,Init 层,可读写层:
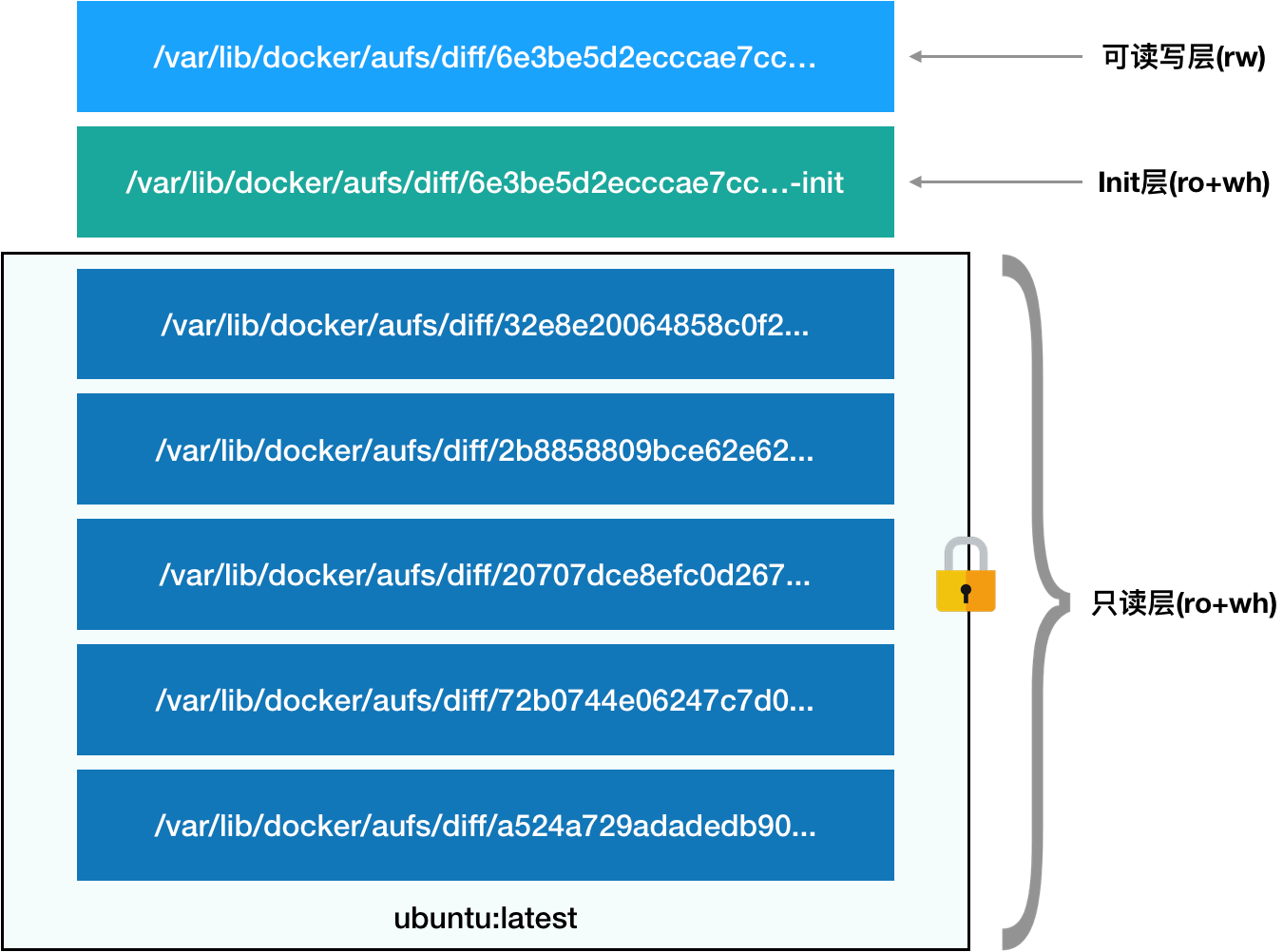
可读写层,是 rootfs 最上面的一层,在没有写入文件之前,这个目录是空的。而一旦在容器里做了写操作,你修改产生的内容就会以增量的方式出现在这个层中。由于只读层是是以只读的方式挂载的,是不是就没法删除只读层里的文件呢?事实上,为了实现这样的删除操作,AuFS 会在可读写层创建一个 whiteout 文件,把只读层里的文件“遮挡”起来。这样,当这两个层被联合挂载之后,只读层的文件就消失了。这个功能,就是 “ro+wh” 的挂载方式,即只读 +whiteout 的含义。
所以,最上面这个可读写层的作用,就是专门用来存放你修改 rootfs 后产生的增量,无论是增、删、改,都发生在这里。而当我们使用完了这个被修改过的容器之后,还可以使用 docker commit 和 push 指令,保存这个被修改过的可读写层,并上传到 Docker Hub 上,供其他人使用;而与此同时,原先的只读层里的内容则不会有任何变化。这就是增量 rootfs 的好处。
Init 层是 Docker 项目单独生成的一个内部层,专门用来存放 /etc/hosts、/etc/resolv.conf 等信息。因为,这些文件本来属于只读的 Ubuntu 镜像的一部分,但是用户往往需要在启动容器时写入一些指定的值比如 hostname,所以就需要在可读写层对它们进行修改。可是,这些修改往往只对当前的容器有效,我们并不希望执行 docker commit 时,把这些信息连同可读写层一起提交掉。所以,Docker 做法是,在修改了这些文件之后,以一个单独的层挂载了出来。而用户执行 docker commit 只会提交可读写层,所以是不包含这些内容的。
制作完成的镜像可以发布到镜像仓库(Repository)上,这有点类似于 Maven 仓库。
Volume(数据卷)
容器技术使用了 rootfs 机制和 Mount Namespace,构建出了一个同宿主机完全隔离开的文件系统环境。而 Volume 机制,允许你将宿主机上指定的目录或者文件,挂载到容器里面进行读取和修改操作,从而使得宿主机和容器里的进程能够互相进行文件访问。这里要使用到的挂载技术,就是 Linux 的绑定挂载(bind mount)机制。它的主要作用就是,允许你将一个目录或者文件,而不是整个设备,挂载到一个指定的目录上。并且,这时你在该挂载点上进行的任何操作,只是发生在被挂载的目录或者文件上,而原挂载点的内容则会被隐藏起来且不受影响,从而保证了容器的隔离性不会被 Volume 打破。
容器 Volume 里的信息,并不会被 docker commit 提交掉;但这个挂载点目录 /test 本身,则会出现在新的镜像当中。
容器技术
总的来说,一个“容器”,实际上是一个由 Linux Namespace、Linux Cgroups 和 rootfs 三种技术构建出来的进程的隔离环境。
一个正在运行的 Linux 容器,其实可以被“一分为二”地看待:
- 一组联合挂载在 /var/lib/docker/aufs/mnt 上的 rootfs,这一部分我们称为“容器镜像”(Container Image),是容器的静态视图
- 一个由 Namespace + Cgroups 构成的隔离环境,这一部分我们称为“容器运行时”(Container Runtime),是容器的动态视图
容器只是运行在宿主机上的一种特殊的进程,多个容器之间使用的就还是同一个宿主机的操作系统内核。这就意味着,如果你的应用程序需要配置内核参数、加载额外的内核模块,以及跟内核进行直接的交互,你就需要注意了:这些操作和依赖的对象,都是宿主机操作系统的内核,它对于该机器上的所有容器来说是一个“全局变量”,牵一发而动全身。
容器本身的设计,就是希望容器和应用能够同生命周期。容器的“单进程模型”,并不是指容器里只能运行“一个”进程,而是指容器没有管理多个进程的能力。这是因为容器里 PID=1 的进程就是应用本身,其他的进程都是这个 PID=1 进程的子进程。可是,用户编写的应用,并不能够像正常操作系统里的 init 进程或者 systemd 那样拥有进程管理的功能。比如,你的应用是一个 Java Web 程序(PID=1),然后你执行 docker exec 在后台启动了一个 Nginx 进程(PID=3)。可是,当这个 Nginx 进程异常退出的时候,你该怎么知道呢?这个进程退出后的垃圾收集工作,又应该由谁去做呢?
Kubernets
容器本身没有价值,有价值的是“容器编排”。“编排”(Orchestration)在云计算行业里不算是新词汇,主要是指用户如何通过某些工具或者配置来完成一组虚拟机以及关联资源的定义、配置、创建、删除等工作,然后由云计算平台按照这些指定的逻辑来完成的过程。而容器时代,“编排”显然就是对 Docker 容器的一系列定义、配置和创建动作的管理。
容器从一个开发者手里的小工具,一跃成为了云计算领域的绝对主角;而能够定义容器组织和管理规范的“容器编排”技术,则当仁不让地坐上了容器技术领域的“头把交椅”。也正因为如此,容器技术生态才爆发了一场关于“容器编排”的“战争”。其中,最具代表性的容器编排工具,当属 Docker 公司的 Compose+Swarm 组合,以及 Google 与 RedHat 公司共同主导的 Kubernetes 项目。而这次战争,最终以 Kubernetes 项目和 CNCF 社区的胜利而告终。
Kubernetes 项目要解决的问题是什么?编排?调度?容器云?还是集群管理?实际上,这个问题到目前为止都没有固定的答案。因为在不同的发展阶段,Kubernetes 需要着重解决的问题是不同的。但是,对于大多数用户来说,他们希望 Kubernetes 项目带来的体验是确定的:现在我有了应用的容器镜像,请帮我在一个给定的集群上把这个应用运行起来。更进一步地说,我还希望 Kubernetes 能给我提供路由网关、水平扩展、监控、备份、灾难恢复等一系列运维能力。
架构
Kubernetes 项目脱胎于Google 内部的 Borg/Omega 系统的设计与经验。Kubernetes 项目正是依托着 Borg 项目的理论优势,才迅速崛起。
Kubernetes 项目的架构,跟它的原型项目 Borg 非常类似,都由 Master 和 Node 两种节点组成,而这两种角色分别对应着控制节点和计算节点。
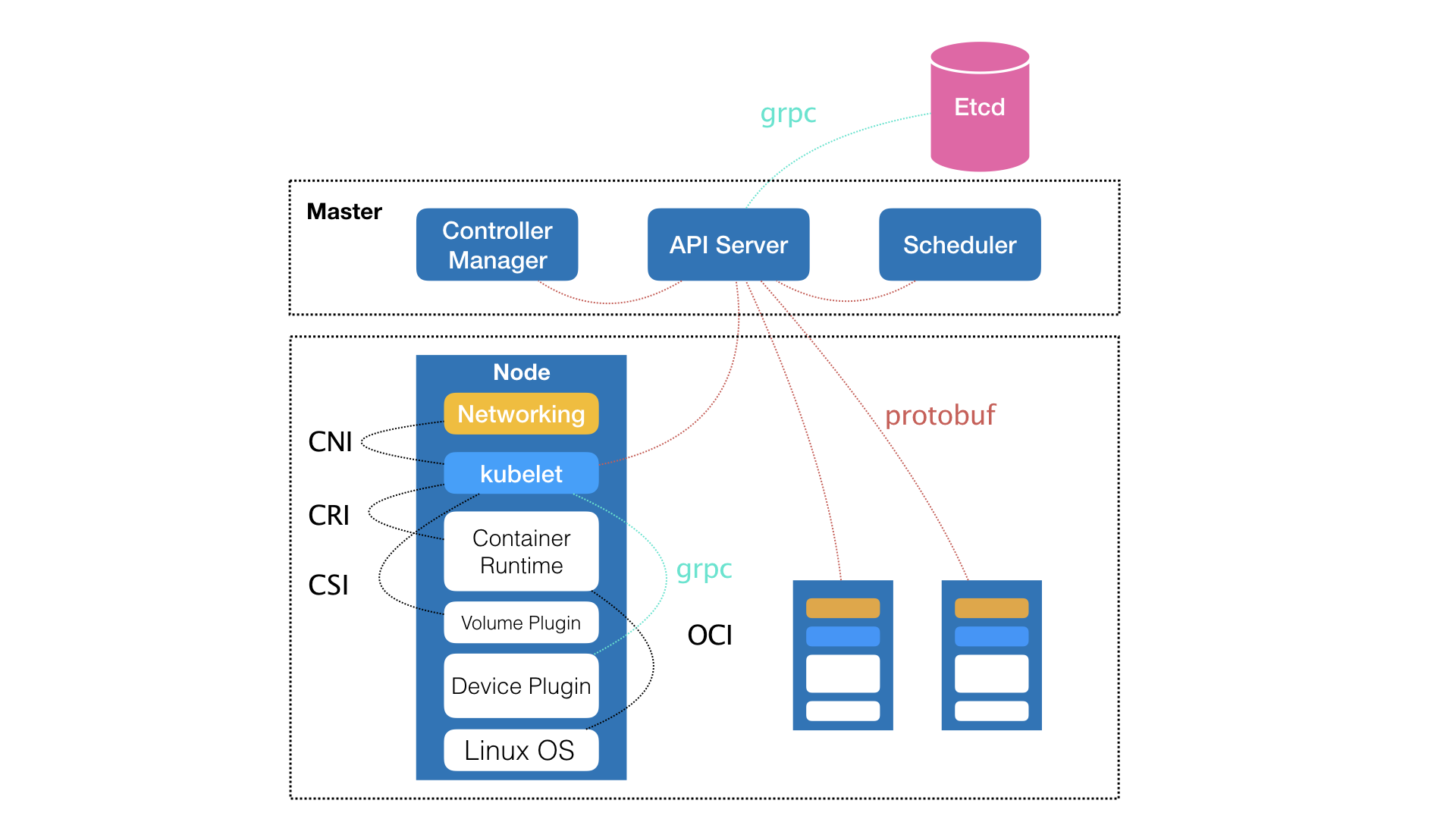
控制节点,即 Master 节点,由三个紧密协作的独立组件组合而成,它们分别是负责 API 服务的 kube-apiserver、负责调度的 kube-scheduler,以及负责容器编排的 kube-controller-manager。整个集群的持久化数据,则由 kube-apiserver 处理后保存在 Etcd 中。
而计算节点上最核心的部分,则是一个叫作 kubelet 的组件: 在 Kubernetes 项目中,kubelet 主要负责同容器运行时(比如 Docker 项目)打交道。而这个交互所依赖的,是一个称作 CRI(Container Runtime Interface)的远程调用接口,这个接口定义了容器运行时的各项核心操作,比如:启动一个容器需要的所有参数。Kubernetes 项目并不关心你部署的是什么容器运行时、使用的什么技术实现,只要你的这个容器运行时能够运行标准的容器镜像,它就可以通过实现 CRI 接入到 Kubernetes 项目当中。
kubelet 还通过 gRPC 协议同一个叫作 Device Plugin 的插件进行交互。这个插件,是 Kubernetes 项目用来管理 GPU 等宿主机物理设备的主要组件。这使得kebuernetes 能够提供对机器学习训练、高性能作业支持。
kubelet 的另一个重要功能,则是调用网络插件和存储插件为容器配置网络和持久化存储。这两个插件与 kubelet 进行交互的接口,分别是 CNI(Container Networking Interface)和 CSI(Container Storage Interface)。
从一开始,Kubernetes 项目就没有像同时期的各种“容器云”项目那样,把 Docker 作为整个架构的核心,而仅仅把它作为最底层的一个容器运行时实现。 Kubernetes 项目要着重解决的问题,则来自于 Borg 的研究人员在论文中提到的一个非常重要的观点: > 运行在大规模集群中的各种任务之间,实际上存在着各种各样的关系。这些关系的处理,才是作业编排和管理系统最困难的地方。
Kubernetes 项目最主要的设计思想是,从更宏观的角度,以统一的方式来定义任务之间的各种关系,并且为将来支持更多种类的关系留有余地。
比如说,Kubernetes 项目对容器间的“访问”进行了分类,首先总结出了一类非常常见的“紧密交互”的关系,即:这些应用之间需要非常频繁的交互和访问;又或者,它们会直接通过本地文件进行信息交换。在常规环境下,这些应用往往会被直接部署在同一台机器上,通过 Localhost 通信,通过本地磁盘目录交换文件。而在 Kubernetes 项目中,这些容器则会被划分为一个“Pod”,Pod 里的容器共享同一个 Network Namespace、同一组数据卷,从而达到高效率交换信息的目的。
而对于另外一种更为常见的需求,比如 Web 应用与数据库之间的访问关系,Kubernetes 项目则提供了一种叫作“Service”的服务。像这样的两个应用,往往故意不部署在同一台机器上,这样即使 Web 应用所在的机器宕机了,数据库也完全不受影响。可是,我们知道,对于一个容器来说,它的 IP 地址等信息不是固定的,那么 Web 应用又怎么找到数据库容器的 Pod 呢?所以,Kubernetes 项目的做法是给 Pod 绑定一个 Service 服务,而 Service 服务声明的 IP 地址等信息是“终生不变”的。这个Service 服务的主要作用,就是作为 Pod 的代理入口(Portal),从而代替 Pod 对外暴露一个固定的网络地址。这样,对于 Web 应用的 Pod 来说,它需要关心的就是数据库 Pod 的 Service 信息。不难想象,Service 后端真正代理的 Pod 的 IP 地址、端口等信息的自动更新、维护,则是 Kubernetes 项目的职责。
围绕着容器和 Pod 不断向真实的技术场景扩展,我们就能够摸索出一幅如下所示的 Kubernetes 项目核心功能的“全景图”:
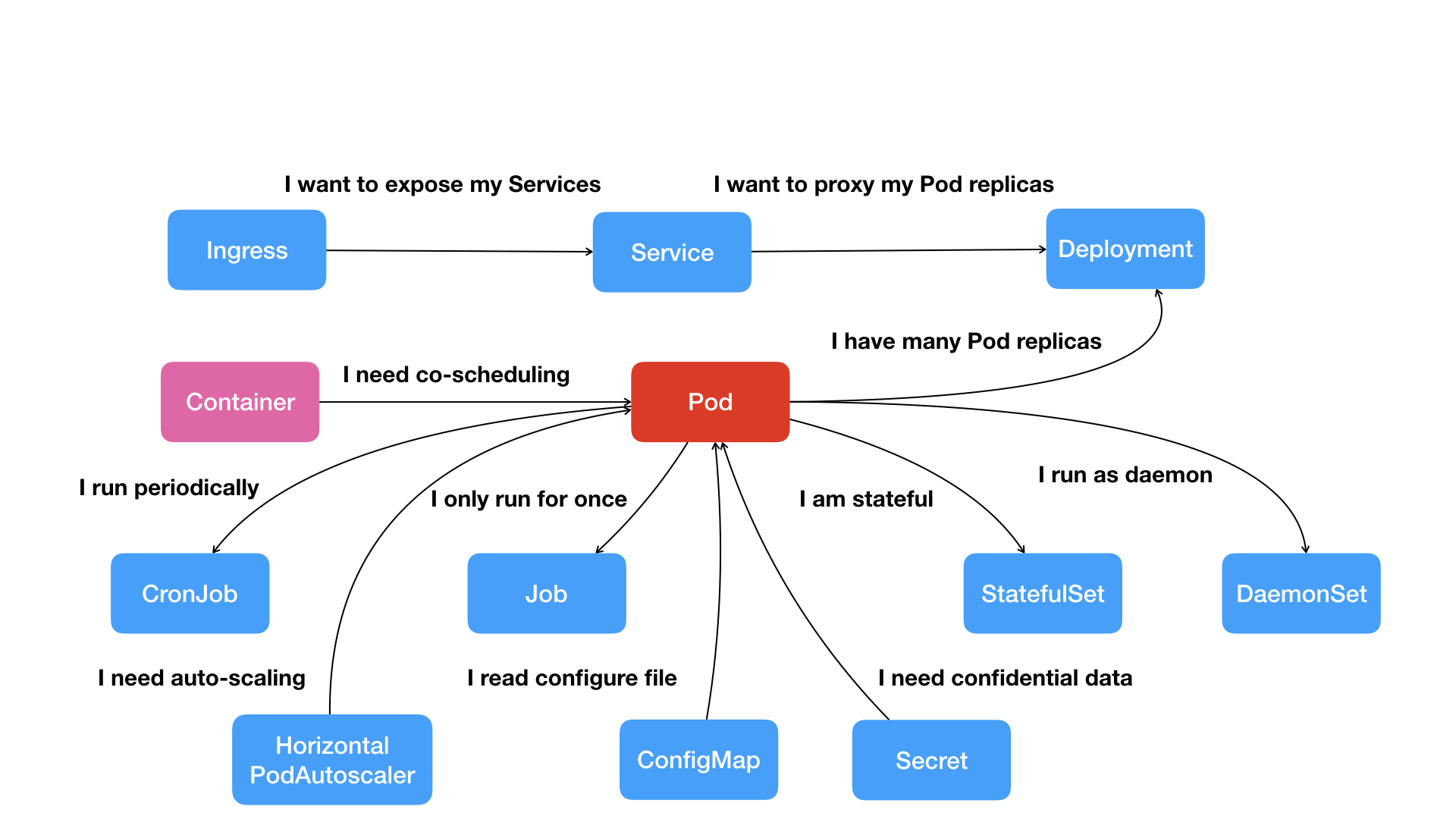
按照这幅图的线索,我们从容器这个最基础的概念出发,首先遇到了容器间“紧密协作”关系的难题,于是就扩展到了 Pod;有了 Pod 之后,我们希望能一次启动多个应用的实例,这样就需要 Deployment 这个 Pod 的多实例管理器;而有了这样一组相同的 Pod 后,我们又需要通过一个固定的 IP 地址和端口以负载均衡的方式访问它,于是就有了 Service。此外,还有用于配制文件读取的 ConfigMap,访问授权信息的 Secret 等。
除了应用与应用之间的关系外,应用运行的形态是影响“如何容器化这个应用”的第二个重要因素。为此,Kubernetes 定义了新的、基于 Pod 改进后的对象。比如 Job,用来描述一次性运行的 Pod(比如,大数据任务);再比如 DaemonSet,用来描述每个宿主机上必须且只能运行一个副本的守护进程服务;又比如 CronJob,则用于描述定时任务等等。
在 Kubernetes 项目中,所推崇的使用方法是:
- 首先,通过一个“编排对象”,比如 Pod、Job、CronJob 等,来描述你试图管理的应用;
- 然后,再为它定义一些“服务对象”,比如 Service、Secret、Horizontal Pod Autoscaler(自动水平扩展器)等。这些对象,会负责具体的平台级功能。
这种使用方法,就是所谓的“声明式 API”。这种 API 对应的“编排对象”和“服务对象”,都是 Kubernetes 项目中的 API 对象(API Object)。 Kubernetes 项目所擅长的,是按照用户的意愿和整个系统的规则,完全自动化地处理好容器之间的各种关系。这种功能,就是我们所说的“编排”。
Pod
Pod,是 Kubernetes 项目的原子调度单位。
Kubernetes 项目所做的,其实就是将“进程组”的概念映射到了容器技术中,并使其成为了这个云计算“操作系统”里的“一等公民”。在 Borg 项目的开发和实践过程中,Google 公司的工程师们发现,他们部署的应用,往往都存在着类似于“进程和进程组”的关系。更具体地说,就是这些应用之间有着密切的协作关系,使得它们必须部署在同一台机器上。而如果事先没有“组”的概念,像这样的运维关系就会非常难以处理。像这样容器间的紧密协作,我们可以称为“超亲密关系”。这些具有“超亲密关系”容器的典型特征包括但不限于:互相之间会发生直接的文件交换、使用 localhost 或者 Socket 文件进行本地通信、会发生非常频繁的远程调用、需要共享某些 Linux Namespace(比如,一个容器要加入另一个容器的 Network Namespace)等等。
资源共享
Pod 只是一个逻辑概念,其实是一组共享了某些资源的容器。更具体一点地说,Pod 里的所有容器,共享的是同一个 Network Namespace,并且可以声明共享同一个 Volume。凡是调度、网络、存储,以及安全相关的属性,基本上是 Pod 级别的。
在 Kubernetes 项目里,Pod 的实现需要使用一个中间容器,这个容器叫作 Infra 容器。在这个 Pod 中,Infra 容器永远都是第一个被创建的容器,而其他用户定义的容器,则通过 Join Network Namespace 的方式,与 Infra 容器关联在一起。在 Kubernetes 项目里,Infra 容器一定要占用极少的资源,所以它使用的是一个非常特殊的镜像,叫作:k8s.gcr.io/pause。这个镜像是一个用汇编语言编写的、永远处于“暂停”状态的容器,解压后的大小也只有 100~200 KB 左右。
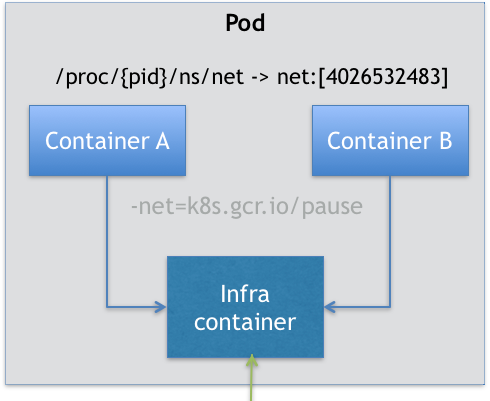
对于 Pod 里的容器 A 和容器 B 来说:
- 它们可以直接使用 localhost 进行通信;
- 它们看到的网络设备跟 Infra 容器看到的完全一样;
- 一个 Pod 只有一个 IP 地址,也就是这个 Pod 的 Network Namespace 对应的 IP 地址;
- 当然,其他的所有网络资源,都是一个 Pod 一份,并且被该 Pod 中的所有容器共享;
- Pod 的生命周期只跟 Infra 容器一致,而与容器 A 和 B 无关
- 一个 Volume 对应的宿主机目录对于 Pod 来说就只有一个,Pod 里的容器只要声明挂载这个 Volume,就一定可以共享这个 Volume 对应的宿主机目录
当用户想在一个容器里跑多个功能并不相关的应用时,应该优先考虑它们是不是更应该被描述成一个 Pod 里的多个容器。
生命周期
Pod 生命周期的变化,主要体现在 Pod API 对象的Status 部分。其中,pod.status.phase,就是 Pod 的当前状态,它有如下几种可能的情况:
- Pending。这个状态意味着,Pod 的 YAML 文件已经提交给了 Kubernetes,API 对象已经被创建并保存在 Etcd 当中。但是,这个 Pod 里有些容器因为某种原因而不能被顺利创建。比如,调度不成功。
- Running。这个状态下,Pod 已经调度成功,跟一个具体的节点绑定。它包含的容器都已经创建成功,并且至少有一个正在运行中。
- Succeeded。这个状态意味着,Pod 里的所有容器都正常运行完毕,并且已经退出了。这种情况在运行一次性任务时最为常见。
- Failed。这个状态下,Pod 里至少有一个容器以不正常的状态(非 0 的返回码)退出。这个状态的出现,意味着你得想办法 Debug 这个容器的应用,比如查看 Pod 的 Events 和日志。
- Unknown。这是一个异常状态,意味着 Pod 的状态不能持续地被 kubelet 汇报给 kube-apiserver,这很有可能是主从节点(Master 和 Kubelet)间的通信出现了问题。
更进一步地,Pod 对象的 Status 字段,还可以再细分出一组 Conditions。这些细分状态的值包括:PodScheduled、Ready、Initialized,以及 Unschedulable。它们主要用于描述造成当前 Status 的具体原因是什么。而其中,Ready 这个细分状态非常值得我们关注:它意味着 Pod 不仅已经正常启动(Running 状态),而且已经可以对外提供服务了。
Sidecar 模式
有一种特殊的容器类型,叫做 Init container。在 Pod 中,所有 Init Container 定义的容器,都会比 spec.containers 定义的用户容器先启动。并且,Init Container 容器会按顺序逐一启动,而直到它们都启动并且退出了,用户容器才会启动。把有顺序关系的容器,定义为 Init Container,是一种更加合理的、松耦合的容器编排诀窍。
容器设计模式里最常用的一种模式叫做 sidecar,指的就是我们可以在一个 Pod 中,启动一个辅助容器,来完成一些独立于主进程(主容器)之外的工作。比如说,如果要实现容器内日志的收集,可以这样来完成:主应用进程不断地把日志文件输出到容器的 /var/log 目录中。把一个 Pod 里的 Volume 挂载到应用容器的 /var/log 目录上。然后,在这个 Pod 里同时运行一个 sidecar 容器,它也声明挂载同一个 Volume 到自己的 /var/log 目录上。接下来 sidecar 容器就只需要做一件事儿,那就是不断地从自己的 /var/log 目录里读取日志文件,转发到外部存储起来。这样,一个最基本的日志收集工作就完成了。
Volume
缺省情况下,一个运行中的容器对文件系统的写入都是发生在其分层文件系统的可写层。一旦容器运行结束,所有写入都会被丢弃。如果数据需要长期存储,那就需要对容器数据做持久化支持。
Kubernetes 和 Docker 类似,也是通过 Volume 的方式提供对存储的支持。Volume 被定义在 Pod 上,可以被 Pod 里的多个容器挂载到相同或不同的路径下。Kubernetes 中 Volume 的 概念与Docker 中的 Volume 类似,但不完全相同。具体区别如下:
- Kubernetes 中的 Volume 与 Pod 的生命周期相同,但与容器的生命周期不相关。当容器终止或重启时,Volume 中的数据也不会丢失。
- 当 Pod 被删除时,Volume 才会被清理。并且数据是否丢失取决于 Volume 的具体类型,比如:emptyDir 类型的 Volume 数据会丢失,而 PV 类型的数据则不会丢失。
目前,Kubernetes 的持久化类型似乎还不支持 HDFS。
Projected Volumn
在 Kubernetes 中,有几种特殊的 Volume,它们存在的意义不是为了存放容器里的数据,也不是用来进行容器和宿主机之间的数据交换。这些特殊 Volume 的作用,是为容器提供预先定义好的数据。这种特殊的 Volume,叫作 Projected Volume。Kubernetes 支持的 Projected Volume 包括 Secret、ConfigMap、Downward API 和 ServiceAccountToken。
Secret的作用是把 Pod 想要访问的加密数据,存放到 Etcd 中。然后,你就可以通过在 Pod 的容器里挂载 Volume 的方式,访问到这些 Secret 里保存的信息了。像这样通过挂载方式进入到容器里的 Secret,一旦其对应的 Etcd 里的数据被更新,这些 Volume 里的文件内容,同样也会被更新。其实,这是 kubelet 组件在定时维护这些 Volume。
与 Secret 类似的是 ConfigMap,它与 Secret 的区别在于,ConfigMap 保存的是不需要加密的、应用所需的配置信息。ConfigMap 的用法几乎与 Secret 完全相同:你可以使用 kubectl create configmap 从文件或者目录创建 ConfigMap,也可以直接编写 ConfigMap 对象的 YAML 文件。
Downward API的作用是让 Pod 里的容器能够直接获取到这个 Pod API 对象本身的信息,比如 Pod 的名字、宿主机的ip、Pod自身的Ip等。
Kubernetes 集群中包含两类用户:一类是由 Kubernetes 管理的 service account,另一类是普通用户。service account 是由 Kubernetes API 管理的帐户。它们都绑定到了特定的 namespace,并由 API server 自动创建,或者通过 API 调用手动创建。Service account 关联了一套凭证,存储在 Secret,这些凭证同时被挂载到 pod 中,从而允许 pod 与 kubernetes API 之间的调用。像这样的 Service Account 的授权信息和文件,实际上保存在它所绑定的一个特殊的 Secret 对象里的。这个特殊的 Secret 对象,就叫作ServiceAccountToken。
容器健康检查和恢复机制
在 Kubernetes 中,你可以为 Pod 里的容器定义一个健康检查“探针”(Probe)。这样,kubelet 就会根据这个 Probe 的返回值决定这个容器的状态,而不是直接以容器进程是否运行(来自 Docker 返回的信息)作为依据。这种机制,是生产环境中保证应用健康存活的重要手段。
Kubernetes 里的Pod 恢复机制,也叫 restartPolicy。它是 Pod 的 Spec 部分的一个标准字段(pod.spec.restartPolicy),默认值是 Always,即:任何时候这个容器发生了异常,它一定会被重新创建。一定要强调的是,Pod 的恢复过程,永远都是发生在当前节点上,而不会跑到别的节点上去。事实上,一旦一个 Pod 与一个节点(Node)绑定,除非这个绑定发生了变化(pod.spec.node 字段被修改),否则它永远都不会离开这个节点。这也就意味着,如果这个宿主机宕机了,这个 Pod 也不会主动迁移到其他节点上去。如果你想让 Pod 出现在其他的可用节点上,就必须使用 Deployment 这样的“控制器”来管理 Pod,哪怕你只需要一个 Pod 副本。
可以通过设置 restartPolicy,改变 Pod 的恢复策略。除了 Always,它还有 OnFailure 和 Never 两种情况:
- Always:在任何情况下,只要容器不在运行状态,就自动重启容器;
- OnFailure: 只在容器 异常时才自动重启容器
- Never: 从来不重启容器
控制器
Kubernetes 通过各种 Controller 来管理 Pod 的生命周期。为了满足不同业务场景,Kubernetes 开发了 Deployment、ReplicaSet、DaemonSet、StatefuleSet、Job 等多种 Controller。 每一个控制器,都以独有的方式负责某种编排功能。Kubernetes 通过 kube-controller-manager 组件来管理这些控制器。控制器都遵循一个通用编排模式,即:控制循环(control loop)
1 2 3 4 5 6 7 8 9 |
for {
实际状态 := 获取集群中对象 X 的实际状态(Actual State)
期望状态 := 获取集群中对象 X 的期望状态(Desired State)
if 实际状态 == 期望状态{
什么都不做
} else {
执行编排动作,将实际状态调整为期望状态
}
} |
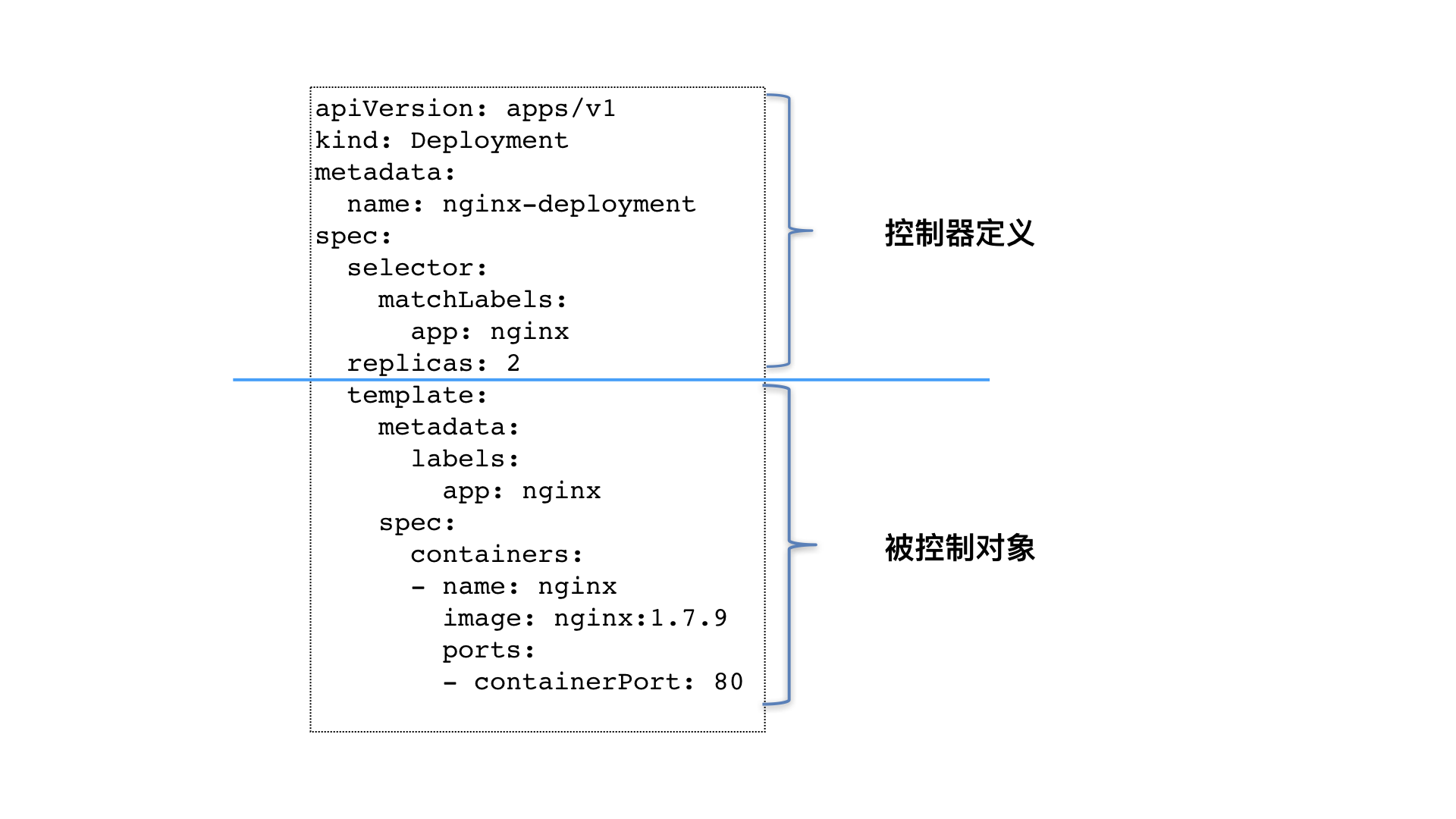
类似 Deployment 这样的一个控制器,实际上都是由上半部分的控制器定义(包括期望状态),加上下半部分的被控制对象的模板组成的。
Deployment
Deployment 为 Pod 和 ReplicaSet 提供声明式更新,可以保证 Pod 以给定的副本数载集群中运行。此外,实现了 Kubernetes 项目中一个非常重要的功能:Pod 的“水平扩展 / 收缩”(horizontal scaling out/in)。
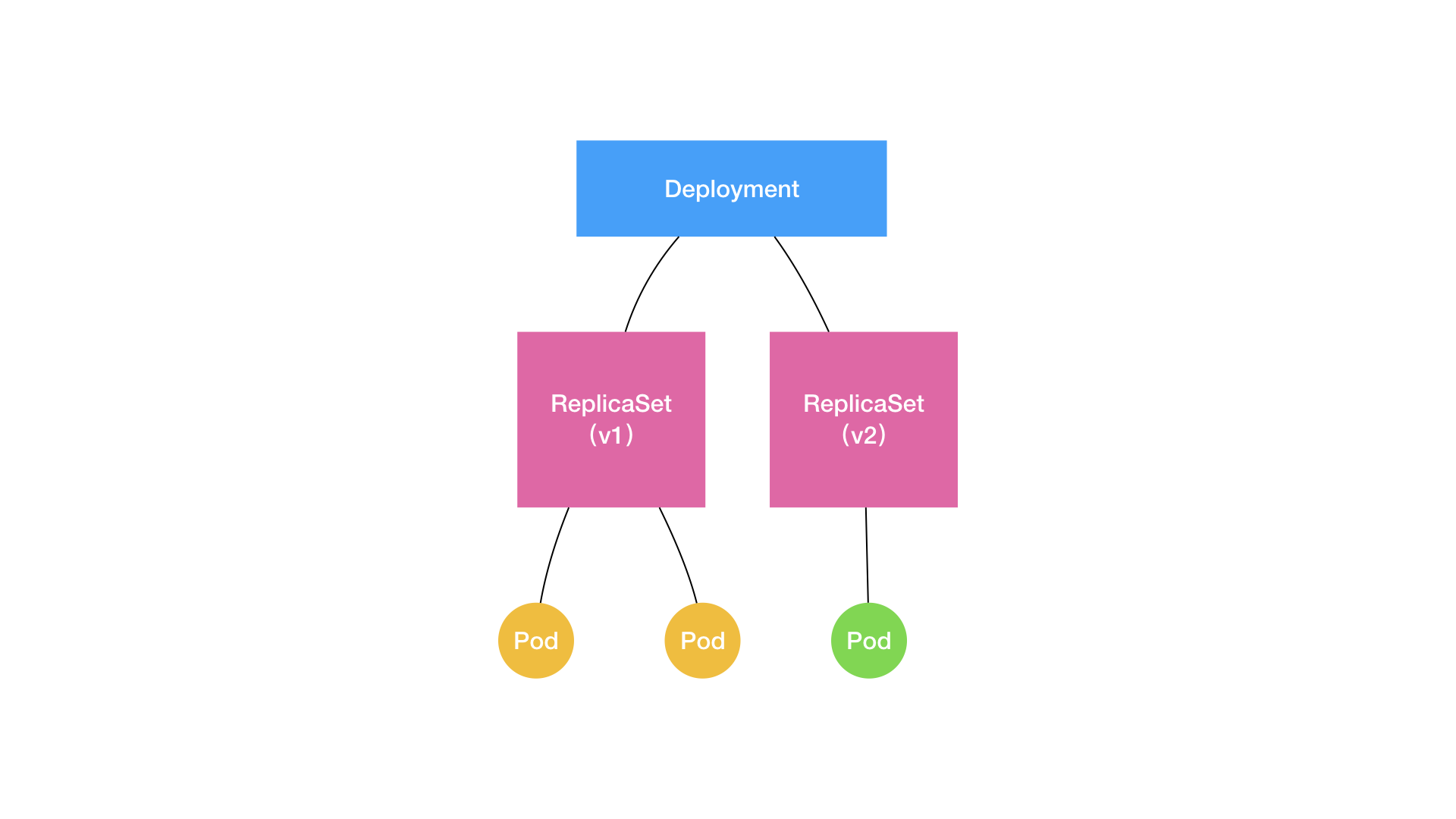
如果你更新了 Deployment 的 Pod 模板(比如,修改了容器的镜像),那么 Deployment 就需要遵循一种叫作“滚动更新”(rolling update)的方式,来升级现有的容器。而这个能力的实现,依赖的是 Kubernetes 项目中的一个非常重要的概念(API 对象):ReplicaSet。一个 ReplicaSet 对象,其实就是由副本数目的定义和一个 Pod 模板组成的,它的定义其实是 Deployment 的一个子集。Deployment 控制器实际操纵的,正是这样的 ReplicaSet 对象,而不是 Pod 对象。
|
|
Deployment 实际上是一个两层控制器。首先,它通过ReplicaSet 的个数来描述应用的版本;然后,它再通过ReplicaSet 的属性(比如 replicas 的值),来保证 Pod 的副本数量。
ReplicaSet 负责通过“控制器模式”,保证系统中 Pod 的个数永远等于指定的个数(比如,3 个)。这也正是 Deployment 只允许容器的 restartPolicy=Always 的主要原因:只有在容器能保证自己始终是 Running 状态的前提下,ReplicaSet 调整 Pod 的个数才有意义。
而在此基础上,Deployment 同样通过“控制器模式”,来操作 ReplicaSet 的个数和属性,进而实现“水平扩展 / 收缩”和“滚动更新”这两个编排动作。
“水平扩展 / 收缩”非常容易实现,Deployment Controller 只需要修改它所控制的 ReplicaSet 的 Pod 副本个数就可以了。当你修改了 Deployment 里的 Pod 定义之后,Deployment Controller 会使用这个修改后的 Pod 模板,创建一个新的 ReplicaSet,这个 ReplicaSet 的初始 Pod 副本数是 0。交替地增加新的 RepicaSet 里运行的 Pod 数量,并减少旧的 ReplicaSet 运行的副本数量。将一个集群中正在运行的多个 Pod 版本,交替地逐一升级的过程,这就是“滚动更新”。
2.3.2 StatefulSet
Deployment 对应用做了一个简单化假设,即一个应用的所有 Pod,是完全一样的。所以,它们互相之间没有顺序,也无所谓运行在哪台宿主机上。需要的时候,Deployment 就可以通过 Pod 模板创建新的 Pod;不需要的时候,Deployment 就可以“杀掉”任意一个 Pod。但是,在实际的场景中,并不是所有的应用都可以满足这样的要求。
尤其是分布式应用,它的多个实例之间,往往有依赖关系,比如:主从关系、主备关系。还有就是数据存储类应用,它的多个实例,往往都会在本地磁盘上保存一份数据。而这些实例一旦被杀掉,即便重建出来,实例与数据之间的对应关系也已经丢失,从而导致应用失败。
所以,这种实例之间有不对等关系,以及实例对外部数据有依赖关系的应用,就被称为“有状态应用”(Stateful Application)。
StatefulSet 把真实世界里的应用状态,抽象为了两种情况:
- 拓扑状态。这种情况意味着,应用的多个实例之间不是完全对等的关系。这些应用实例,必须按照某些顺序启动,比如应用的主节点 A 要先于从节点 B 启动。而如果你把 A 和 B 两个 Pod 删除掉,它们再次被创建出来时也必须严格按照这个顺序才行。并且,新创建出来的 Pod,必须和原来 Pod 的网络标识一样,这样原先的访问者才能使用同样的方法,访问到这个新 Pod。
- 存储状态。这种情况意味着,应用的多个实例分别绑定了不同的存储数据。对于这些应用实例来说,Pod A 第一次读取到的数据,和隔了十分钟之后再次读取到的数据,应该是同一份,哪怕在此期间 Pod A 被重新创建过。这种情况最典型的例子,就是一个数据库应用的多个存储实例。
StatefulSet 这个控制器的主要作用之一,就是使用 Pod 模板创建 Pod 的时候,对它们进行编号,并且按照编号顺序逐一完成创建工作。而当 StatefulSet 的“控制循环”发现 Pod 的“实际状态”与“期望状态”不一致,需要新建或者删除 Pod 进行“调谐”的时候,它会严格按照这些 Pod 编号的顺序,逐一完成这些操作。
在部署“有状态应用”的时候,应用的每个实例拥有唯一并且稳定的“网络标识”,是一个非常重要的假设。通过 Headless Service 的方式(见后续Service部分),StatefulSet 为每个 Pod 创建了一个固定并且稳定的 DNS 记录,来作为它的访问入口。
StatefulSet 对存储状态的管理机制,主要使用的是一个叫作 Persistent Volume Claim 的功能。Kubernetes 项目引入了一组叫作 Persistent Volume Claim(PVC)和 Persistent Volume(PV)的 API 对象。有了 PVC 之后,一个开发人员想要使用一个 Volume,需要两步配制:1)定义一个 PVC,声明想要的 Volume 的属性 2)在应用的 Pod 中,声明使用这个 PVC。PVC对象不需要任何关于 Volume 细节的字段,只有描述性的属性和定义,只要创建了这个 PVC 对象,Kubernetes 就会自动为它绑定一个符合条件的 Volume。这些符合条件的 Volume,来自于由运维人员维护的 PV 对象。PVC 和 PV 的设计,实际上类似于“接口”和“实现”的思想。PVC 其实就是一种特殊的 Volume。只不过一个 PVC 具体是什么类型的 Volume,要在跟某个 PV 绑定之后才知道。
StatefulSet 其实就是一种特殊的 Deployment,而其独特之处在于,它的每个 Pod 都被编号了。而且,这个编号会体现在 Pod 的名字和 hostname 等标识信息上,这不仅代表了 Pod 的创建顺序,也是 Pod 的重要网络标识(即:在整个集群里唯一的、可被的访问身份)。
有了这个编号后,StatefulSet 就使用 Kubernetes 里的两个标准功能:Headless Service 和 PV/PVC,实现了对 Pod 的拓扑状态和存储状态的维护。
Kubernetes 通过 Headless Service,为这些有编号的 Pod,在 DNS 服务器中生成带有同样编号的 DNS 记录。只要 StatefulSet 能够保证这些 Pod 名字里的编号不变,那么 Service 里类似于 web-0.nginx.default.svc.cluster.local 这样的 DNS 记录也就不会变,而这条记录解析出来的 Pod 的 IP 地址,则会随着后端 Pod 的删除和再创建而自动更新。
StatefulSet 还为每一个 Pod 分配并创建一个同样编号的 PVC。这样,Kubernetes 就可以通过 Persistent Volume 机制为这个 PVC 绑定上对应的 PV,从而保证了每一个 Pod 都拥有一个独立的 Volume。在这种情况下,即使 Pod 被删除,它所对应的 PVC 和 PV 依然会保留下来。所以当这个 Pod 被重新创建出来之后,Kubernetes 会为它找到同样编号的 PVC,挂载这个 PVC 对应的 Volume,从而获取到以前保存在 Volume 里的数据。
DaemonSet
DaemonSet 的主要作用,是让你在 Kubernetes 集群里,运行一个 Daemon Pod。 所以,这个 Pod 有如下三个特征:
- 这个 Pod 运行在 Kubernetes 集群里的每一个节点(Node)上
- 每个节点上只有一个这样的 Pod 实例
- 当有新的节点加入 Kubernetes 集群后,该 Pod 会自动地在新节点上被创建出来;而当旧节点被删除后,它上面的 Pod 也相应地会被回收掉
Job 和 CronJob
Deployment、StatefulSet,以及 DaemonSet 这三个控制器的主要编排对象都是 Long Running Task(长作业),这些应用一旦运行起来,除非出错或者停止,它的容器进程会一直保持在 Running 状态。
有一类作业显然不满足这样的条件,这就是“离线业务”,或者叫作 Batch Job(计算业务)。这种业务在计算完成后就直接退出了,而此时如果你依然用 Deployment 来管理这种业务的话,就会发现 Pod 会在计算结束后退出,然后被 Deployment Controller 不断地重启;而像“滚动更新”这样的编排功能,更无从谈起了。
Kubernetes 早期并不支持离线业务,后来才逐步设计出了一个用来描述离线业务的 API 对象,它的名字就是 Job。
|
|
在 Job 的 Pod 模板中,restartPolicy 只允许被设置为 Never 和 OnFailure。如果这个离线作业失败了:
- restartPolicy=Never,那么离线作业失败后 Job Controller 就会不断地尝试创建一个新 Pod。这个尝试肯定不能无限进行下去,可以通过 spec.backoffLimit 指定重试次数
- restartPolicy=OnFailure,那么离线作业失败后,Job Controller 就不会去尝试创建新的 Pod。但是,它会不断地尝试重启 Pod 里的容器
当一个 Job 的 Pod 运行结束后,它会进入 Completed 状态。有一个 spec.activeDeadlineSeconds 字段可以设置最长运行时间。
在 Job 对象中,有两个参数负责任务的并行控制:
- spec.parallelism,它定义的是一个 Job 在任意时间最多可以启动多少个 Pod 同时运行;
- spec.completions,它定义的是 Job 至少要完成的 Pod 数目,即 Job 的最小完成数。
CronJob 描述的是定时任务。CronJob 是一个 Job 对象的控制器,它创建和删除 Job 的依据是 schedule 字段定义的一个标准的 Unix Cron 表达式。
容器网络
Linux 容器能看见的“网络栈”,实际上是被隔离在它自己的Network Namespace 当中的。所谓“网络栈”,就包括了:网卡(Network Interface)、回环设备(Loopback Device)、路由表(Routing Table)和 iptables 规则。对于一个进程来说,这些要素,其实就构成了它发起和响应网络请求的基本环境。作为一个容器,它可以声明直接使用宿主机的网络栈(–net=host),即:不开启 Network Namespace。像这样直接使用宿主机网络栈的方式,虽然可以为容器提供良好的网络性能,但也会不可避免地引入共享网络资源的问题,比如端口冲突。所以,在大多数情况下,我们都希望容器进程能使用自己 Network Namespace 里的网络栈,即:拥有属于自己的 IP 地址和端口。
这个被隔离的容器进程,该如何跟其他 Network Namespace 里的容器进程进行交互呢?
而为了实现上述目的,Docker 项目会默认在宿主机上创建一个名叫 docker0 的网桥,凡是连接在 docker0 网桥上的容器,就可以通过它来进行通信。可是,我们又该如何把这些容器“连接”到 docker0 网桥上呢?这时候,我们就需要使用一种名叫Veth Pair的虚拟设备了。
Veth Pair 设备的特点是:它被创建出来后,总是以两张虚拟网卡(Veth Peer)的形式成对出现的。并且,从其中一个“网卡”发出的数据包,可以直接出现在与它对应的另一张“网卡”上,哪怕这两个“网卡”在不同的 Network Namespace 里。这就使得 Veth Pair 常常被用作连接不同 Network Namespace 的“网线”。
在默认情况下,被限制在 Network Namespace 里的容器进程,实际上是通过 Veth Pair 设备 + 宿主机网桥的方式,实现了跟同其他容器的数据交换。
默认情况下,容器可以主动访问到外部网络的连接,但是外部网络无法访问到容器。容器所有到外部网络的连接,源地址都会被 NAT 成本地系统的 IP 地址。这是使用 iptables 的源地址伪装操作实现的。为了让外部网络能够访问容器,可以在 docker run 时候通过 -p 或 -P 参数来启用端口映射。这其实也是在本地的 iptable 的 nat 表中添加对应的规则来实现的。比如我们执行 docker run -p 8080:80,就是在宿主机上通过 iptables 设置了一条DNAT(目的地址转换)转发规则。这条规则的作用是,当宿主机上的进程访问“< 宿主机的 IP 地址 >:8080”时,iptables 会把该请求直接转发到“< 容器的 IP 地址 >:80”上。也就是说,这个请求最终会经过 docker0 网桥进入容器里面。
在 Docker 的默认配置下,不同宿主机上的容器通过 IP 地址进行互相访问是根本做不到的。为了解决这个容器“跨主通信”的问题,社区里才出现了很多的容器网络方案。这些方案有一个共性,那就是用户的容器都连接在 docker0 网桥上。而网络插件则在宿主机上创建了一个特殊的设备,docker0 与这个设备之间,通过 IP 转发(路由表)进行协作。然后,网络插件真正要做的事情,则是通过某种方法,把不同宿主机上的特殊设备连通,从而达到容器跨主机通信的目的。
上面这个流程,也正是 Kubernetes 对容器网络的主要处理方法。只不过,Kubernetes 是通过一个叫作 CNI 的接口,维护了一个单独的网桥来代替 docker0。这个网桥的名字就叫作:CNI 网桥,它在宿主机上的设备名称默认是:cni0。
在“Kubernetes 网络模型”中:
- 所有容器都可以直接使用 IP 地址与其他容器通信
- 所有宿主机都可以直接使用 IP 地址与所有容器通信
- 容器自己“看到”的自己的 IP 地址,和别人(宿主机或者容器)看到的地址是完全一样的。
Service
Service 是 Kubernetes 项目中用来将一组 Pod 暴露给外界访问的一种机制。比如,一个 Deployment 有 3 个 Pod,那么我就可以定义一个 Service。然后,用户只要能访问到这个 Service,它就能访问到某个具体的 Pod。Kubernetes 之所以需要 Service,一方面是因为 Pod 的 IP 不是固定的,另一方面则是因为一组 Pod 实例之间总会有负载均衡的需求。
Service 通过使用 selector 字段来声明这个 Service 代理携带了给定标签的 Pod。而被 selector 选中的 Pod,就称为 Service 的 Endpoints。
那么,这个 Service 又是如何被访问的呢?
- 第一种方式,是以 Service 的 VIP(Virtual IP,即:虚拟 IP)方式。比如:当我访问 10.0.23.1 这个 Service 的 IP 地址时,10.0.23.1 其实就是一个 VIP,它会把请求转发到该 Service 所代理的某一个 Pod 上。
- 第二种方式,就是以 Service 的 DNS 方式。比如:这时候,只要我访问“my-svc.my-namespace.svc.cluster.local”这条 DNS 记录,就可以访问到名叫 my-svc 的 Service 所代理的某一个 Pod。
而在第二种 Service DNS 的方式下,具体还可以分为两种处理方法:
- 第一种处理方法,是 Normal Service。这种情况下,你访问“my-svc.my-namespace.svc.cluster.local”解析到的,正是 my-svc 这个 Service 的 VIP,后面的流程就跟 VIP 方式一致了。
- 第二种处理方法,正是 Headless Service。这种情况下,你访问“my-svc.my-namespace.svc.cluster.local”解析到的,直接就是 my-svc 代理的某一个 Pod 的 IP 地址。 这里的区别在于,Headless Service 不需要分配一个 VIP,而是可以直接以 DNS 记录的方式解析出被代理 Pod 的 IP 地址。
Service 是由 kube-proxy 组件,加上 iptables 来共同实现的。
一旦一个 Service 被提交给 Kubernetes,kube-proxy 就可以通过 Service 的 Informer 感知到这样一个 Service 对象的添加,而作为对这个事件的响应,它就会在宿主机上创建对应的 iptables 规则。这背后其实是一系列的 DNAT 规则,而这些规则的作用,就是在路由之前,将流入 IP 包的目的地址和端口,改成 –to-destination 所指定的新的目的地址和端口,这个目的地址和端口,正是被代理 Pod 的 IP 地址和端口。这样,访问 Service VIP 的 IP 包经过上述 iptables 处理之后,就已经变成了访问具体某一个后端 Pod 的 IP 包了。不难理解,这些 Endpoints 对应的 iptables 规则,正是 kube-proxy 通过监听 Pod 的变化事件,在宿主机上生成并维护的。
kube-proxy 通过 iptables 处理 Service 的过程,其实需要在宿主机上设置相当多的 iptables 规则。而且,kube-proxy 还需要在控制循环里不断地刷新这些规则来确保它们始终是正确的。一直以来,基于 iptables 的 Service 实现,都是制约 Kubernetes 项目承载更多量级的 Pod 的主要障碍。而 IPVS 模式的 Service,就是解决这个问题的一个行之有效的方法。IPVS 模式的工作原理,其实跟 iptables 模式类似。当我们创建了前面的 Service 之后,kube-proxy 首先会在宿主机上创建一个虚拟网卡。相比于 iptables,IPVS 在内核中的实现其实也是基于 NAT 模式,所以在转发这一层上,理论上 IPVS 并没有显著的性能提升。但是,IPVS 并不需要在宿主机上为每个 Pod 设置 iptables 规则,而是把对这些“规则”的处理放到了内核态,从而极大地降低了维护这些规则的代价。
在 Kubernetes 中,Service 和 Pod 都会被分配对应的 DNS A 记录(从域名解析 IP 的记录)。对于 ClusterIP 模式的 Service 来说,它的 A 记录的格式是:..svc.cluster.local。当你访问这条 A 记录的时候,它解析到的就是该 Service 的 VIP 地址。而对于指定了 clusterIP=None 的 Headless Service 来说,它的 A 记录的格式也是:..svc.cluster.local。但是,当你访问这条 A 记录的时候,它返回的是所有被代理的 Pod 的 IP 地址的集合。当然,如果客户端没办法解析这个集合的话,它可能会只会拿到第一个 Pod 的 IP 地址。
实际上,Service 机制,以及 Kubernetes 里的 DNS 插件,都是在帮助你解决同样一个问题,即:如何找到我的某一个容器?这个问题在平台级项目中,往往就被称作服务发现,即:当我的一个服务(Pod)的 IP 地址是不固定的且没办法提前获知时,我该如何通过一个固定的方式访问到这个 Pod 呢?
ClusterIP 模式的 Service 为你提供的,就是一个 Pod 的稳定的 IP 地址,即 VIP。并且,这里 Pod 和 Service 的关系是可以通过 Label 确定的。 而 Headless Service 为你提供的,则是一个 Pod 的稳定的 DNS 名字,并且,这个名字是可以通过 Pod 名字和 Service 名字拼接出来的。
但是,Service 的访问信息在 Kubernetes 集群之外,其实是无效的。所谓 Service 的访问入口,其实就是每台宿主机上由 kube-proxy 生成的 iptables 规则,以及 kube-dns 生成的 DNS 记录。而一旦离开了这个集群,这些信息对用户来说,也就自然没有作用了。所以,在使用 Kubernetes 的 Service 时,一个必须要面对和解决的问题就是:如何从外部(Kubernetes 集群之外),访问到 Kubernetes 里创建的 Service?
最常用的一种方式就是:NodePort,这个其实就和端口映射类似,通过在每台宿主机上生成这样对应的 iptables 规则。外部访问 Service 的第二种方式,可以指定一个 LoadBalancer 类型的 Service。Kubernetes 会创建一个负载均衡服务,并且把被代理的 Pod 的 IP 地址配置给负载均衡服务做后端。第三种方式是通过配置 ExternalName。
总的来说,所谓 Service,其实就是 Kubernetes 为 Pod 分配的、固定的、基于 iptables(或者 IPVS)的访问入口。而这些访问入口代理的 Pod 信息,则来自于 Etcd,由 kube-proxy 通过控制循环来维护。
说明
本文主要是本人学习深入剖析Kubernetes专栏的笔记。如果你对本文内容感兴趣,强烈建议去极客时间订阅该专栏。
-EOF-
文章作者 jrthe42
原始链接 https://blog.jrwang.me/2018/container-and-kubernetes/
上次更新 2019-11-05
许可协议 CC BY-NC-ND 4.0